土筑虎平台对刊登之所有信息不声明或认证其内容正确性或可靠性;您于此接受并承认信赖任何信息所生的风险应自行承担,平台方有权但无此义务;改善或更正所刊登信息任何部分之错误或疏失。
一、 概述
对中国造船业来说,有效地提升吊装效率、减少船坞周期是提升企业效益和生产速率,增强竞争力的有效措施。船坞的数字化作业是达到精益造船目的的必要措施,青岛海徕通过广泛调研,依附于船坞数字化作业的基本原理,对三维坐标下数字化船坞的架构进行了探究和可行性实施方案。数字化船坞,通过架设多方位全站仪对吊装环段的实时搭载结果数据显示观察,以便实时获取吊装数据,准确高效,实时快捷。
数字化船坞是建立在船坞周围的基准标靶记录表示原来船坞中的船体中心线、肋位线和高度基准线,形成统一的船坞坐标系。以建立自然温度场对总段、总段定位间隙影响的数学模型为前提,建立总段定位最优方案的决策方法为目标,通过充分利用现有的软件系统Tribon M3和DACS等,将传统的船坞搭载定位作业通过点预先进行模拟,实现取消船坞格子线,总段实现快速定位无余量搭载、一次性定位,以达到节省工时、提高龙门吊使用效率、缩短船坞周期的目的。
数字化船坞通过在船坞四周树立旋转标靶,在船坞区域形成控制网,船舶进坞后即按照首制总段在控制网内的位置进行定位和坐标确认,后续搭载总段定位作业即根据坞壁四周的旋转标靶所形成的控制网进行,从而实现船坞虚拟化,将实际的船坞作业在电脑中进行模拟,配合最终MES文件和模拟搭载使用,实现船坞作业虚拟化、数字化。
二、 原理
在搭载分段前后四个位置处各架设一台马达驱动全站仪,全站仪通过数据线连接WiFi通讯模块,通过网络进行WiFi模块和数字化船坞软件通讯,如下图所示,用于观测吊装过程搭载分段上四个搭载定位点与最终吊装位置的偏差,当显示结果到达理论最佳位置时,停止分段移动,在此定位,从而达到通过实时观测数据控制吊装结果,实时准确,快捷高效。
图 二 1全站仪实时跟踪测量图
全站仪实时跟踪测量过程如上,测量数据通过WiFi模块实时与DigitalDock软件进行通讯,如图所示:
图 二 2 WiFi与DigitalDock软件通讯示意图
三、 软件介绍
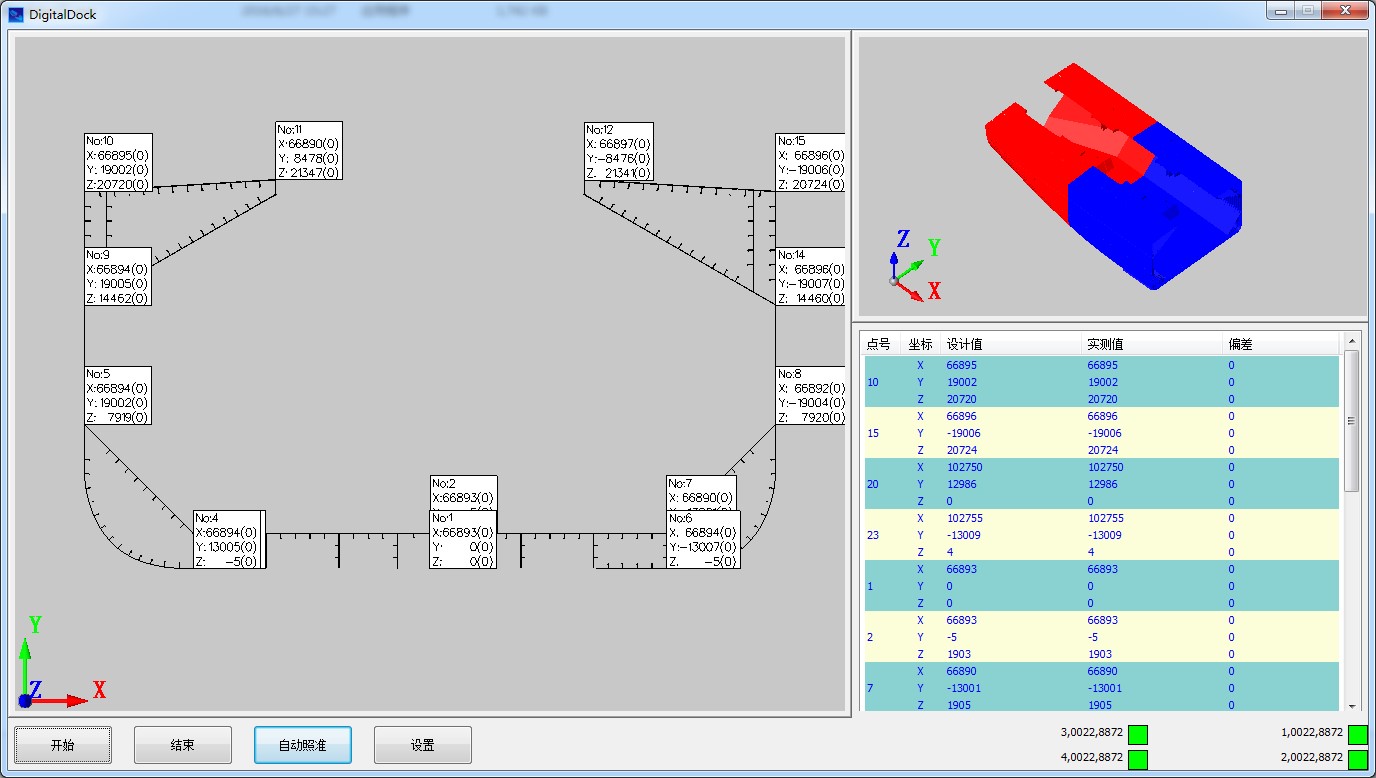
软件主界面:
三个显示区,分别是:搭载面图形区,搭载三维图形区,搭载实时数据区;
一个按钮操作栏,控制测量过程、仪器照准和软件设置;
一个全站仪连接状态显示区,显示全站仪连接成功与否。
图 三 1软件启动界面图
功能介绍:
搭载面图形区
图 三 2 搭载面图形区
搭载标注:搭载环段当前位置相对于最终搭载位置的数据偏差(软件启动初始状态偏差默认为0,当开始测量时,实时显示实际偏差数据);
左下角是分段当前状态的坐标轴;
模拟三维图形区
图 三 3 模拟三维图形区
该界面显示实时模拟搭载的状态。
搭载实时数据区
图 三 4 搭载实时数据区
表中的序号表示用户选择的搭载点,表中数据依次表示搭载点目标位置、当前位置、以及偏差值(软件启动初始状态为0,随着全站仪返回当前结果,数据实时更新);
该表格数值随着搭载的进行实时更新。
按钮操作区
图 三 5 按钮操作区
1) 开始:
“开始”按钮的变换状态如图:
图 三 6 按钮状态变化图
“开始”按钮有三个状态,“开始”、“暂停”、“继续”;
点击“开始”,软件开始运行,测量数据同时按钮变为“暂停”状态;
点击“暂停”,软件中止运行,按钮变成“继续”,等待用户操作;
点击“继续”,软件继续运行,测量数据,返回结果。
2) 结束:
点击“结束”按钮,结束测量,关闭数字化船坞软件对话框;
3) 自动照准:
界面如图:
图 三 7 自动照准界面
“SN”号码用于标识一台全站仪,在随后的下拉框里面选择一个匹配的定位点,点击“照准”按钮,全站仪自动搜索定位到棱镜位置。
4) 设置:
设置界面如下图:
图 三 8 设置“常规”
“小数位数”:用于设置显示数字的精确度,默认值是0,单位默认是mm;
“恢复默认”会把当前页恢复到软件设置的默认值;
“全部恢复默认”会把所有的设置选项恢复到初始化状态;
“确认”按钮把当前用户设定的值,传给软件;
“取消”按钮,取消用户输入的各参数设定值。
设置完毕后,软件会自动记录用户设定的值,下次启动时,自动加载。
全站仪的连接状态
图 三 9 全站仪连接状态图
不同连接按钮前的机身号标识不同的全站仪,如:SN:00001;
连接状态:绿色表示连接成功;红色表示连接断开。
四、 使用流程介绍
1. 现场测量
用户通过DACS-PDA手持测量设备连接全站仪,进行现场测量,获得分段实测数据文件;
精度分析
使用DACS-OFFICE新建精度分析工程,导入设计模型,在设计模型上标注设计点,导入测量数据。距离绑定后进行分段分析,如图:
图 四 1 精度分析基准段
图 四 2 精度分析搭载段
精度分析达到标准的分段可等待进行模拟搭载。
模拟搭载
启动DACS-SIMULATION模拟搭载软件,完成模拟搭载工作,如图:
图 四 3 模拟搭载图
完成模拟搭载后,用户选择合适的测量点作为搭载定位点:
选中测量点,定位到属性栏,将其设为搭载定位点,如图:
图 四 4 定位点设置
下拉列表改为“是”
图 四 5 定位点设置
启动程序
选择定位点完毕后,点击“常用--其它--现场定位”,启动DACS-DigitalDock数字化船坞软件;
图 四 6 启动图标
启动后界面如图所示:
图 四 7 启动界面
全站仪的连接检测
将设置好通讯参数的WiFi模块连接全站仪,连接就绪后,等待软件启动,软件启动后会自动检索全站仪(检索全站仪数量根据软件默认数量而定,软件默认四个)。
图 四 8 全站仪连接检测图
检索成功的全站仪会由绿色表示,失败的用红色表示,而且检索过程将一直运行,直到软件关闭为止。
设置菜单
用户为软件设置合适的参数值:
图 四 9 设置“常规”
设置软件显示的小数位数及棱镜数量(棱镜最多支持8个),点击“确定”设置完毕,点击“取消”放弃本次操作。
图 四 10 设置“颜色”
色标刻度:偏差不同范围显示的点颜色
图 四 11 设置“色标”
鼠标敏感阈值设置:
图 四 12 设置“敏感与选择范围”
自动照准
点击“自动照准”,显示界面如图:
图 四 13 自动照准
点击下拉框,为全站仪选择一个对应的棱镜,然后点击“照准”,若照准成功,则弹出如下对话框:
图 四 14 照准成功
若照准失败则提示失败对话框:
图 四 15 照准失败
开始跟踪测量
开始/暂停/继续 :
点击“开始”,转变为“暂停”,此时用户可以进行观察,分段的偏差距离,及时调整搭载方向;调整完毕后,点击“暂停”会转变为“继续”,点击按钮,继续运行,检测搭载过程;
图 四 16 操作按钮
结束
当偏差值达到允许阈值,点击“结束”按钮完成搭载,关闭软件,如图:
软件启动状态(偏差显示为0):
图 四 17 启动初始界面图
吊装进行状态(搭载段红色显示,表示偏差过大,须进一步调整):
图 四 18 吊装进行界面图
吊装最佳位置阈值状态(搭载段绿色显示,表示偏差已接近吊装最佳位置,用户根据观察当前偏差决定是否结束跟踪):
图 四 19 吊装结束界面图
如上图所示,当搭载环段由远及近移动时,搭载环段颜色由红变绿,表示偏差值由大变小,用户可观察当前偏差,符合标准后,点击“结束”按钮,结束跟踪测量搭载环段当前位置即为吊装的最佳位置。